Proxemics with humans
Robot path planning is an old and well-established technology. However, the default used by many navigation packages is to treat people the same as any other objects in the environment.
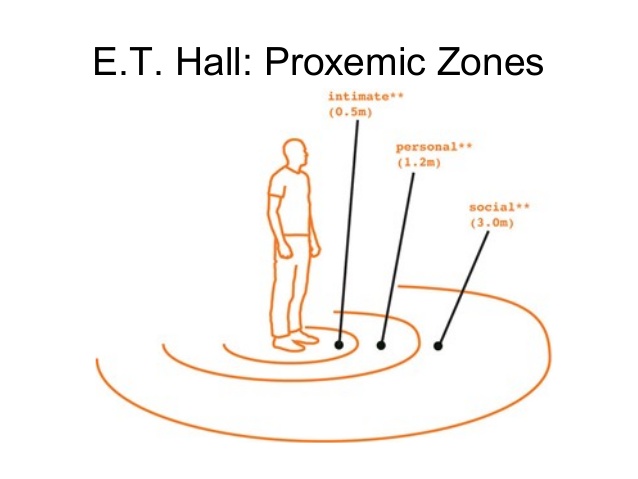
We know that people have specific ‘proxemic’ zones as detailed in the work of E. T. Hall. These zones represent various levels of comfort we feel when people approach us, or move through ‘our space’.
One way to address this is to adjust navigation costs around people. This is the mechanism used by the social navigation layer included as part of the 2D costmap model distributed with ROS. In this costmap layer a gaussian distribution of costs is generated, that start high close to the person and decrease as the distance from the person increases.
We have a partial implementation of a version of Hall’s proxemics through our own costmap layer. In this work the costs associated with each proxemic zone (Public, Social, Personal and Intimate) were statically determined a-priori based on our own observations. We want to explore this more systematically, using both prior research in approach proxemics, and close observation of people with respect to the robot. We will also explore the dynamic sizing of zones. As seen in human-human interaction we know that the size of these zones is dynamic with respect to the environment. It is not appropriate to maintain the same zone sizes and costs when in confined environments such as elevators, or crowded hallways, for example. We will see how to model impacts behavior in close spaces, such as elevators, and we expect to see emergent behavior, where the robot situates itself in corners of the structure, away from people, similar to our behavior in such spaces.
When generating appropriate robot behaviors in response to people, we will explore the impact of the proxemic model described above. Much of this can take place in simulation before deployment in public spaces. For example, we will determine if navigation tracks around people are appropriate, and how it impacts planning behavior in terms of time, and social acceptability.
We will determine group membership based on the overlap of personal space, and determine socially appropriate path-planning based on group membership. Current models allow for dispreferred path planning with respect to engaged social groups - i.e. a robot can and will navigate directly between two or more people engaged in a conversation.
The impact on path planning and navigation of our proxemic model needs careful study, both in simulation and in real-world application. Using the Gazebo simulator, we can generate random people both as singletons and in groups, and determine impact on path planning from both efficiency and proxemic appropriateness standpoints. We can vary the sizes of the environment (modeling for instance a hallway, or an elevator), and determine how the robot should respond, changing the size of the proxemic zones dynamically if it helps a robot enter a busy, but not crowded elevator, for instance. The robot will then be evaluated in the wild, both following people and navigating between them, using a standard costmap, the proxemic model of Lu, and our own implementation of Hall’s proxemic model. Human feedback as well as objective measures will be recorded.
References
Edward T. Hall. The Hidden Dimension. Doubleday, 1966.
Katrina Francis. Proxemically Aware Robot Navigation. Technical report, Union College, Department of Computer Science, 06 2019.
Rafael Ramon-Vigo, Noe Perez-Higueras, Fernando Caballero, and Luis Merino. Transferring human navigation behaviors into a robot local planner. In The 23rd IEEE International Symposium on Robot and Human Interactive Communication, 2014.
David V. Lu, Dave Hershberger, and William D. Smart. Layered Costmaps for Context- Sensitive Navigation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2014.
Nick Webb
Associate Professor of Computer Science / Director of Data Analytics
My research interests include Natural Language Processing, Social Robotics and Data Analytics.