Dialogue Engine for HRI
We have built a very simple, finite-state based dialogue manager to control interactions with the robot. In conjunction with a vector space model of language understanding, this model is effective for what it is.
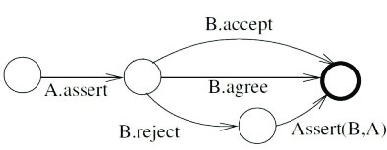
However, we would like to experiment with and evaluate different models of dialogue. From frame-based approaches that are relatively common, to Augmented Transition Networks (ATNs) that can control both dialogue and actions, we’ll look at ways of giving the robot dialogue capability.
We can also explore using recent GPT models for casual dialogue.
References
N. Webb, A. De Roeck, U. Kruschwitz, P. Scott, S. Steel, R. Turner (1999). Natural Language Engineering: Slot-Filling in the YPA. Proceedings of the Workshop on Natural Language Interfaces, Dialogue and Partner Modelling (at the Fachtagung für Kn̈stliche Intelligenz KI'99).
Hilda Hardy, Alan Biermann, R. Bryce Inouye, Ashley Mckenzie, Tomek Strzalkowski, Cristian Ursu, Nick Webb, Min Wu (2004). Data Driven Strategies for an automated dialogue system. Proceedings of the 42nd Annual Meeting of the Association for Computational Linguistics (ACL 2004), Barcelona.
Lemon, Oliver & Bracy, Anne & Gruenstein, Alexander & Peters, Stanley. (2001). The WITAS multi-modal dialogue system I. 1559-1562. 10.21437/Eurospeech.2001-350.
N. Webb. SRR Dialogue System Overview. Technical Report. 12/2022
Nick Webb
Associate Professor of Computer Science / Director of Data Analytics
My research interests include Natural Language Processing, Social Robotics and Data Analytics.