Approaching people
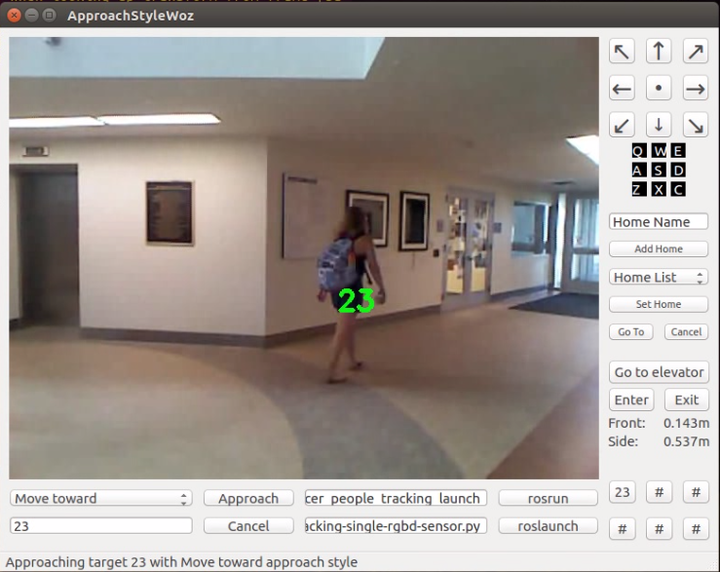 Wizard of Oz Interface
Wizard of Oz Interface
When the robot wants to approach a human, how the robot chooses to move can have an impact on the liklihood of a succesful interaction.
For instance, factors including acceleration toward the person, deceleration on arrival, and velocity during travel can impact the perception of the robot by those around it. While there is substantial prior work in this area, it is often contradictory. Direction of approach is often confounded with the the attitude of the person (whether they are sitting, standing or moving).
We will conduct comprehensive in-lab experiments to explore approaches toward a variety of individuals and groups of people satisfying a number of experimental conditions. However, this is a key area where lab results are questionable, and in-the-wild studies across a range of tasks is necessary. Initial testing in the lab, will then translated to the hallways and corridors of the college, to determine the impact of approach speeds and directions on real people outside of the lab.
Our own work has focused on the evaluation of robot approach movement and it’s impact on HRI task completion; do certain movements result in higher task completion percentages?
For the acceleration, deceleration and smoothing elements, we will build on the work of Ferland and Tapus to determine the impact on humans around the robot in differing situations and locations.
We can also replicate lab-based approach models to determine which conditions impact approach direction and speed, substantially more comprehensively than has been presented before. Human feedback on approach direction, speed, and factors such as acceleration, deceleration and any uncertainty around small adjustments in position will be recorded.
References
Aaron Cass, Kristina Striegnitz, Nick Webb, Venus Yu (2018). Exposing real-world challenges using HRI in the wild. 4th Workshop on Public Space Human-Robot Interaction (PubRob) at the International Conference on Human-Computer Interaction with Mobile Devices and Services (MobileHCI 2018).
Aaron Cass, Eric Rose, Kristina Striegnitz, Nick Webb (2015). Determining appropriate first contact distance: trade-offs in human-robot interaction experiment design. Workshop on Designing and Evaluating Social Robots for Public Settings at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2015)
F. Ferland and A. Tapus, “Crowd sourcing ‘approach behavior’ control parameters for human-robot interaction,” 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2017, pp. 785-790.
Nick Webb
Associate Professor of Computer Science / Director of Data Analytics
My research interests include Natural Language Processing, Social Robotics and Data Analytics.